FinSH Console¶
In the early days of computer development, before the advent of graphics systems, there was no mouse or even a keyboard. How did people interact with computers at the time? The earliest computers used a punched note to enter commands into the computer and write the program. Later, with the continuous development of computers, monitors and keyboards became the standard configuration of computers, but the operating system at this time did not support the graphical interface. Computer pioneers developed a software that accepts commands entered by the user, and after interpretation, passes it to The operating system and return the results of the operating system execution to the user. This program wraps around the operating system like a layer of shell, so it's called a shell.
Embedded devices usually need to connect the development board to the PC for communication. Common connections include: serial port, USB, Ethernet, Wi-Fi, etc. A flexible shell should also support working on multiple connection methods. With the shell, the developer can easily get the system running and control the operation of the system through commands. Especially in the debugging phase, with the shell, in addition to being able to locate the problem more quickly, the developer can also use the shell to call the test function, change the parameters of the test function, reduce the number of times the code is downloaded, and shorten the development time of the project.
FinSH is the command line component (shell) of RT-Thread. It is based on the above considerations. FinSH is pronounced [ˈfɪnʃ]. After reading this chapter, we will have a deeper understanding of how FinSH works and how to export your own commands to FinSH.
Introduction of FinSH¶
FinSH is the command line component of RT-Thread. It provides a set of operation interfaces for users to call from the command line. It is mainly used to debug or view system information. It can communicate with a PC using serial/Ethernet/USB, etc. The hardware topology is shown below:
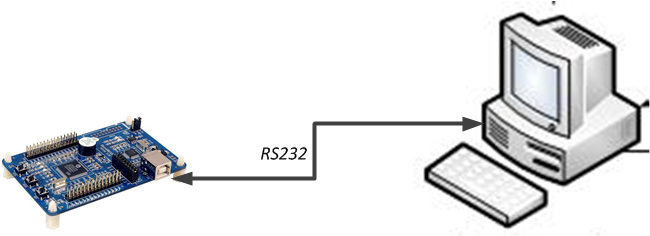
The user inputs a command in the control terminal, and the control terminal transmits the command to the FinSH in the device through the serial port, USB, network, etc., FinSH will read the device input command, parse and automatically scan the internal function table, find the corresponding function name, and execute the function. The response is output, the response is returned through the original path, and the result is displayed on the control terminal.
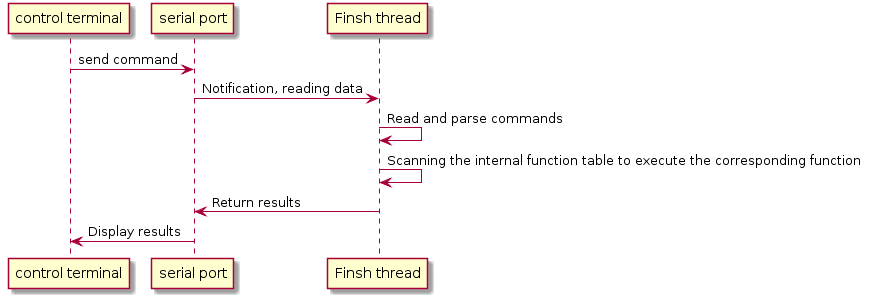
When using a serial port to connect a device to a control terminal, the execution flow of the FinSH command is as follows:
FinSH supports the rights verification function. After the system is started, the system will perform the rights verification. Only when the rights verification is passed, the FinSH function will be enabled. This improves the security of system input.
FinSH supports auto-completion, and viewing history commands, etc. These functions can be easily accessed through the keys on the keyboard. The keys supported by FinSH are shown in the following table:
| Keys | Functional Description |
|---|---|
| Tab key | Pressing the Tab key when no characters are entered will print all commands supported by the current system. If you press the Tab key when you have entered some characters, it will find the matching command, and will also complete the file name according to the file system's current directory, and you can continue to input, multiple completions. |
| ↑↓ key | Scroll up and down the recently entered history command |
| Backspace key | Delete character |
| ←→ key | Move the cursor left or right |
FinSH supports two input modes, the traditional command line mode and the C language interpreter mode.
Traditional Command Line Mode¶
This mode is also known as msh(module shell). In msh mode, FinSH is implemented in the same way as the traditional shell (dos/bash). For example, you can switch directories to the root directory with the cd / command.
MSH can parse commands into parameters and parameters separated by spaces. Its command execution format is as follows:
command [arg1] [arg2] [...]
The command can be either a built-in command in RT-Thread or an executable file.
C Language Interpreter Mode¶
This mode is also known as C-Style mode. In C language interpreter mode, FinSH can solve and parse most C language expressions, and use functions like C to access functions and global variables in the system. In addition, it can create variables through the command line. In this mode, the command entered must be similar to the function call in C language, that is, you must carry the () symbol. For example, to output all current threads and their status in the system, type list_thread() in FinSH to print out the required information. The output of the FinSH command is the return value of this function. For some functions that do not have a return value (void return value), this printout has no meaning.
Initially FinSH only supported C-Style mode. Later, with the development of RT-Thread, C-Style mode is not convenient when running scripts or programs, and it is more convenient to use traditional shell method. In addition, in C-Style mode, FinSH takes up a lot of volume. For these reasons, the msh mode has been added to RT-Thread. The msh mode is small and easy to use. It is recommended that you use the msh mode.
If both modes are enabled in the RT-Thread, they can be dynamically switched. Enter the exit in msh mode and press Enter to switch to C-Style mode. Enter msh() in C-Style mode and press Enter to enter msh mode. The commands of the two modes are not common, and the msh command cannot be used in C-Style mode, and vice versa.
FinSH Built-in Commands¶
Some FinSH commands are built in by default in RT-Thread. You can print all commands supported by the current system by entering help in FinSH and pressing Enter or directly pressing Tab. The built-in commands in C-Style and msh mode are basically the same, so msh is taken as an example here.
In msh mode, you can list all currently supported commands by pressing the Tab key. The number of default commands is not fixed, and the various components of RT-Thread will output some commands to FinSH. For example, when the DFS component is opened, commands such as ls, cp, and cd are added to FinSH for developers to debug.
The following are all currently supported commands that display RT-Thread kernel status information after pressing the Tab key. The command name is on the left and the description of the command on the right:
RT-Thread shell commands: version - show RT-Thread version information list_thread - list thread list_sem - list semaphore in system list_event - list event in system list_mutex - list mutex in system list_mailbox - list mail box in system list_msgqueue - list message queue in system list_timer - list timer in system list_device - list device in system exit - return to RT-Thread shell mode. help - RT-Thread shell help. ps - List threads in the system. time - Execute command with time. free - Show the memory usage in the system.
Here lists the field information returned after entering the common commands, so that the developer can understand the content of the returned information.
Display Thread Status¶
Use the ps or list_thread command to list all thread information in the system, including thread priority, state, maximum stack usage, and more.
msh />list_thread thread pri status sp stack size max used left tick error -------- --- ------- ---------- ---------- ------ ---------- --- tshell 20 ready 0x00000118 0x00001000 29% 0x00000009 000 tidle 31 ready 0x0000005c 0x00000200 28% 0x00000005 000 timer 4 suspend 0x00000078 0x00000400 11% 0x00000009 000
| Field | Description |
|---|---|
| thread | Thread name |
| pri | Thread priority |
| status | The current state of the thread |
| sp | The current stack position of the thread |
| stack size | Thread stack size |
| max used | The maximum stack position used in thread history |
| left tick | The number of remaining ticks of the thread |
| error | Thread error code |
Display Semaphore Status¶
Use the list_sem command to display all semaphore information in the system, including the name of the semaphore, the value of the semaphore, and the number of threads waiting for this semaphore.
msh />list_sem semaphore v suspend thread -------- --- -------------- shrx 000 0 e0 000 0
list_sem Return field description:
| Field | Description |
|---|---|
| semaphore | Semaphore name |
| v | The current value of semaphore |
| suspend thread | The number of threads waiting for this semaphore |
Display Event Status¶
Use the list_event command to display all event information in the system, including the event name, the value of the event, and the number of threads waiting for this event.
msh />list_event event set suspend thread ----- ---------- --------------
list_event Return field description:
| Field | Description |
|---|---|
| event | Event set name |
| set | The current event in the event set |
| suspend thread | The number of threads waiting for an event in this event set |
Display Mutex Status¶
Use the list_mutex command to display all mutex information in the system, including the mutex name, the owner of the mutex, and the number of nestings the owner holds on the mutex.
msh />list_mutex mutex owner hold suspend thread -------- -------- ---- -------------- fat0 (NULL) 0000 0 sal_lock (NULL) 0000 0
list_mutex Return field description:
| Field | Description |
|---|---|
| mutxe | Mutex name |
| owner | The thread currently holding the mutex |
| hold | The number of times the holder is nested on this mutex |
| suspend thread | The number of threads waiting for this mutex |
Display Mailbox Status¶
Use the list_mailbox command to display all mailbox information in the system, including the mailbox name, the number of messages in the mailbox, and the maximum number of messages the mailbox can hold.
msh />list_mailbox mailbox entry size suspend thread -------- ---- ---- -------------- etxmb 0000 0008 1:etx erxmb 0000 0008 1:erx
list_mailbox Return field description:
| Field | Description |
|---|---|
| mailbox | Mailbox name |
| entry | The number of messages included in the mailbox |
| size | The maximum number of messages a mailbox can hold |
| suspend thread | The number of threads waiting for this mailbox |
Display Message Queue Status¶
Use the list_msgqueue command to display all message queue information in the system, including the name of the message queue, the number of messages it contains, and the number of threads waiting for this message queue.
msh />list_msgqueue msgqueue entry suspend thread -------- ---- --------------
list_msgqueue Return field description:
| Field | Description |
|---|---|
| msgqueue | Message queue name |
| entry | The number of messages currently included in the message queue |
| suspend thread | Number of threads waiting for this message queue |
Display Memory Pool Status¶
Use the list_mempool command to display all the memory pool information in the system, including the name of the memory pool, the size of the memory pool, and the maximum memory size used.
msh />list_mempool mempool block total free suspend thread ------- ---- ---- ---- -------------- signal 0012 0032 0032 0
list_mempool Return field description:
| Field | Description |
|---|---|
| mempool | Memory pool name |
| block | Memory block size |
| total | Total memory block |
| free | Free memory block |
| suspend thread | The number of threads waiting for this memory pool |
Display Timer Status¶
Use the list_timer command to display all the timer information in the system, including the name of the timer, whether it is the periodic timer, and the number of beats of the timer timeout.
msh />list_timer timer periodic timeout flag -------- ---------- ---------- ----------- tshell 0x00000000 0x00000000 deactivated tidle 0x00000000 0x00000000 deactivated timer 0x00000000 0x00000000 deactivated
list_timer Return field description:
| Field | Description |
|---|---|
| timer | Timer name |
| periodic | Whether the timer is periodic |
| timeout | The number of beats when the timer expires |
| flag | The state of the timer, activated indicates active, and deactivated indicates inactive |
Display Device Status¶
Use the list_device command to display all device information in the system, including the device name, device type, and the number of times the device was opened.
msh />list_device device type ref count ------ ----------------- ---------- e0 Network Interface 0 uart0 Character Device 2
list_device Return field description:
| Field | Description |
|---|---|
| device | Device name |
| type | Device type |
| ref count | The number of times the device was opened |
Display Dynamic Memory Status¶
Use the free command to display all memory information in the system.
msh />free total memory: 7669836 used memory : 15240 maximum allocated memory: 18520
free Return field description:
| Field | Description |
|---|---|
| total memory | Total memory size |
| used memory | Used memory size |
| maximum allocated memory | Maximum allocated memory |
Custom FinSH Command¶
In addition to the commands that come with FinSH, FinSH also provides multiple macro interfaces to export custom commands. The exported commands can be executed directly in FinSH.
Custom msh Command¶
The custom msh command can be run in msh mode. To export a command to msh mode, you can use the following macro interface:
MSH_CMD_EXPORT(name, desc);
| Parameter | Description |
|---|---|
| name | The command to export |
| desc | Description of the export command |
This command can export commands with parameters, or export commands without parameters. When exporting a parameterless command, the input parameter of the function is void. The example is as follows:
void hello(void) { rt_kprintf("hello RT-Thread!\n"); } MSH_CMD_EXPORT(hello , say hello to RT-Thread);
When exporting a command with parameters, the function's input parameters are int argc and char**argv. Argc represents the number of arguments, and argv represents a pointer to a command-line argument string pointer array. An example of exporting a parameter command is as follows:
static void atcmd(int argc, char**argv) { …… } MSH_CMD_EXPORT(atcmd, atcmd sample: atcmd <server|client>);
Custom C-Style Commands and Variables¶
Export custom commands to C-Style mode can use the following interface:
FINSH_FUNCTION_EXPORT(name, desc);
| Parameter | Description |
|---|---|
| name | The command to export |
| desc | Description of the export command |
The following example defines a hello function and exports it as a command in C-Style mode:
void hello(void) { rt_kprintf("hello RT-Thread!\n"); } FINSH_FUNCTION_EXPORT(hello , say hello to RT-Thread);
In a similar way, you can also export a variable that can be accessed through the following interface:
FINSH_VAR_EXPORT(name, type, desc);
| Parameter | Description |
|---|---|
| name | The variable to be exported |
| type | Type of variable |
| desc | Description of the exported variable |
The following example defines a dummy variable and exports it to a variable command in C-Style mode.:
static int dummy = 0; FINSH_VAR_EXPORT(dummy, finsh_type_int, dummy variable for finsh)
Custom Command Rename¶
The function name length of FinSH is limited. It is controlled by the macro definition FINSH_NAME_MAX in finsh.h. The default is 16 bytes, which means that the FinSH command will not exceed 16 bytes in length. There is a potential problem here: when a function name is longer than FINSH_NAME_MAX, after using FINSH_FUNCTION_EXPORT to export the function to the command table, the full function name is seen in the FinSH symbol table, but a full node execution will result in a null node error. This is because although the full function name is displayed, in fact FinSH saves the first 16 bytes as a command. Too many inputs will result in the command not being found correctly. In this case, you can use FINSH_FUNCTION_EXPORT_ALIAS to re-export the command name.
FINSH_FUNCTION_EXPORT_ALIAS(name, alias, desc);
| Parameter | Description |
|---|---|
| name | The command to export |
| alias | The name that is displayed when exporting to FinSH |
| desc | Description of the export command |
The command can be exported to msh mode by adding __cmd_ to the renamed command name. Otherwise, the command will be exported to C-Style mode. The following example defines a hello function and renames it to ho and exports it to a command in C-Style mode.
void hello(void) { rt_kprintf("hello RT-Thread!\n"); } FINSH_FUNCTION_EXPORT_ALIAS(hello , ho, say hello to RT-Thread);
FinSH Function Configuration¶
The FinSH function can be cropped, and the macro configuration options are defined in the rtconfig.h file. The specific configuration items are shown in the following table.
| Macro Definition | Value Type | Description | Default |
|---|---|---|---|
| #define RT_USING_FINSH | None | Enable FinSH | on |
| #define FINSH_THREAD_NAME | String | FinSH thread name | "tshell" |
| #define FINSH_USING_HISTORY | None | Turn on historical traceback | on |
| #define FINSH_HISTORY_LINES | Integer type | Number of historical command lines that can be traced back | 5 |
| #define FINSH_USING_SYMTAB | None | Symbol table can be used in FinSH | on |
| #define FINSH_USING_DESCRIPTION | None | Add a description to each FinSH symbol | on |
| #define FINSH_USING_MSH | None | Enable msh mode | on |
| #define FINSH_USING_MSH_ONLY | None | Use only msh mode | on |
| #define FINSH_ARG_MAX | Integer type | Maximum number of input parameters | 10 |
| #define FINSH_USING_AUTH | None | Enable permission verification | off |
| #define FINSH_DEFAULT_PASSWORD | String | Authority verification password | off |
The reference configuration example in rtconfig.h is as follows, and can be configured according to actual functional requirements.
/* Open FinSH */ #define RT_USING_FINSH /* Define the thread name as tshell */ #define FINSH_THREAD_NAME "tshell" /* Open history command */ #define FINSH_USING_HISTORY /* Record 5 lines of history commands */ #define FINSH_HISTORY_LINES 5 /* Enable the use of the Tab key */ #define FINSH_USING_SYMTAB /* Turn on description */ #define FINSH_USING_DESCRIPTION /* Define FinSH thread priority to 20 */ #define FINSH_THREAD_PRIORITY 20 /* Define the stack size of the FinSH thread to be 4KB */ #define FINSH_THREAD_STACK_SIZE 4096 /* Define the command character length to 80 bytes */ #define FINSH_CMD_SIZE 80 /* Open msh function */ #define FINSH_USING_MSH /* Use msh function by default */ #define FINSH_USING_MSH_DEFAULT /* The maximum number of input parameters is 10 */ #define FINSH_ARG_MAX 10
FinSH Application Examples¶
Examples of msh Command without Arguments¶
This section demonstrates how to export a custom command to msh. The sample code is as follows, the hello function is created in the code, and the hello function can be exported to the FinSH command list via the MSH_CMD_EXPORT command.
#include <rtthread.h> void hello(void) { rt_kprintf("hello RT-Thread!\n"); } MSH_CMD_EXPORT(hello , say hello to RT-Thread);
Once the system is up and running, press the tab key in the FinSH console to see the exported command:
msh /> RT-Thread shell commands: hello - say hello to RT-Thread version - show RT-Thread version information list_thread - list thread ……
Run the hello command and the results are as follows:
msh />hello hello RT_Thread! msh />
Example of msh Command with Parameters¶
This section demonstrates how to export a custom command with parameters to FinSH. The sample code is as follows, the atcmd() function is created in the code, and the atcmd() function can be exported to the msh command list via the MSH_CMD_EXPORT command.
#include <rtthread.h> static void atcmd(int argc, char**argv) { if (argc < 2) { rt_kprintf("Please input'atcmd <server|client>'\n"); return; } if (!rt_strcmp(argv[1], "server")) { rt_kprintf("AT server!\n"); } else if (!rt_strcmp(argv[1], "client")) { rt_kprintf("AT client!\n"); } else { rt_kprintf("Please input'atcmd <server|client>'\n"); } } MSH_CMD_EXPORT(atcmd, atcmd sample: atcmd <server|client>);
Once the system is running, press the Tab key in the FinSH console to see the exported command:
msh /> RT-Thread shell commands: hello - say hello to RT-Thread atcmd - atcmd sample: atcmd <server|client> version - show RT-Thread version information list_thread - list thread ……
Run the atcmd command and the result is as follows:
msh />atcmd Please input 'atcmd <server|client>' msh />
Run the atcmd server command and the result is as follows:
msh />atcmd server AT server! msh />
Run the atcmd client command and the result is as follows:
msh />atcmd client AT client! msh />
FinSH Porting¶
FinSH is written entirely in ANSI C and has excellent portability; it has a small memory footprint, and FinSH will not dynamically request memory if you do not use the functions described in the previous section to dynamically add symbols to FinSH. The FinSH source is located in the components/finsh directory. Porting FinSH requires attention to the following aspects:
- FinSH thread:
Each command execution is done in the context of a FinSH thread (that is, a tshell thread). When the RT_USING_FINSH macro is defined, the FinSH thread can be initialized by calling finsh_system_init() in the initialization thread. In RT-Thread 1.2.0 and later, you don't have to use the finsh_set_device(const char* device_name) function to explicitly specify the device to be used. Instead, the rt_console_get_device() function is called automatically to use the console device (The finsh_set_device(const char* device_name) must be used in 1.1.x and below to specify the device used by FinSH. The FinSH thread is created in the function finsh_system_init() function, which will wait for the rx_sem semaphore.
- FinSH output:
The output of FinSH depends on the output of the system and relies on the rt_kprintf() output in RT-Thread. In the startup function rt_hw_board_init(), the rt_console_set_device(const char* name) function sets the FinSH printout device.
- FinSH input:
After the rin_sem semaphore is obtained, the FinSH thread calls the rt_device_read() function to obtain a character from the device (select serial device) and then process it. So the migration of FinSH requires the implementation of the rt_device_read() function. The release of the rx_sem semaphore completes the input notification to the FinSH thread by calling the rx_indicate() function. The usual process is that when the serial port receive interrupt occurs (that is, the serial port has input character), the interrupt service routine calls the rx_indicate() function to notify the FinSH thread that there is input, and then the FinSH thread obtains the serial port input and finally performs the corresponding command processing.